
I received a Master of Science (M.S.) from Xi’an Jiaotong University and am currently a full-time research intern at Tencent Robotics X. My research experience spans a range of topics in computer vision and robotics, including 3D reconstruction with RGBD and stereo sensors, 6D pose estimation, 7-DoF grasp pose estimation, and robot system setup and calibration. I am broadly interested in embodied intelligence, with a particular focus on robotic perception and VLA (Vision-Language-Action).
🔥 News
- 2025.02: 🎉🎉 1 paper accepted to CVPR2025.
- 2023.06: 🎉🎉 1 paper accepted to IROS2023.
📝 Publications
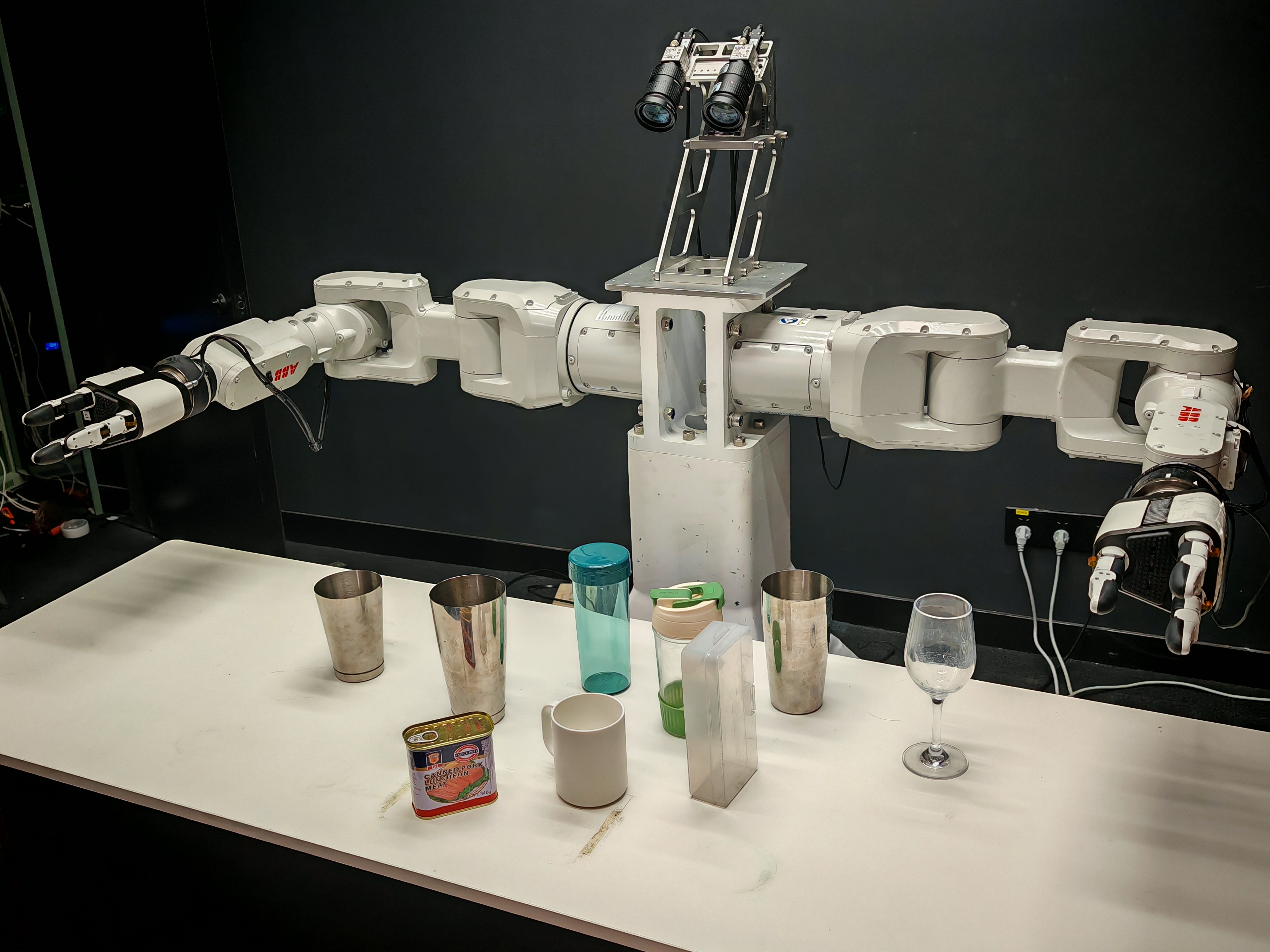
Leveraging Global Stereo Consistency for Category-Level Shape and 6D Pose Estimation from Stereo Images (CVPR2025)
Download the video demo here for a detailed look!
Junning Qiu, Minglei Lu, Fei Wang, Yu Guo, Yonggen Ling
A stereo-based method is proposed to mitigate inherent parameter entanglement in category-level shape and 6D pose estimation by leveraging global stereo consistency, enabling robust performance across diverse materials without relying on explicit depth.
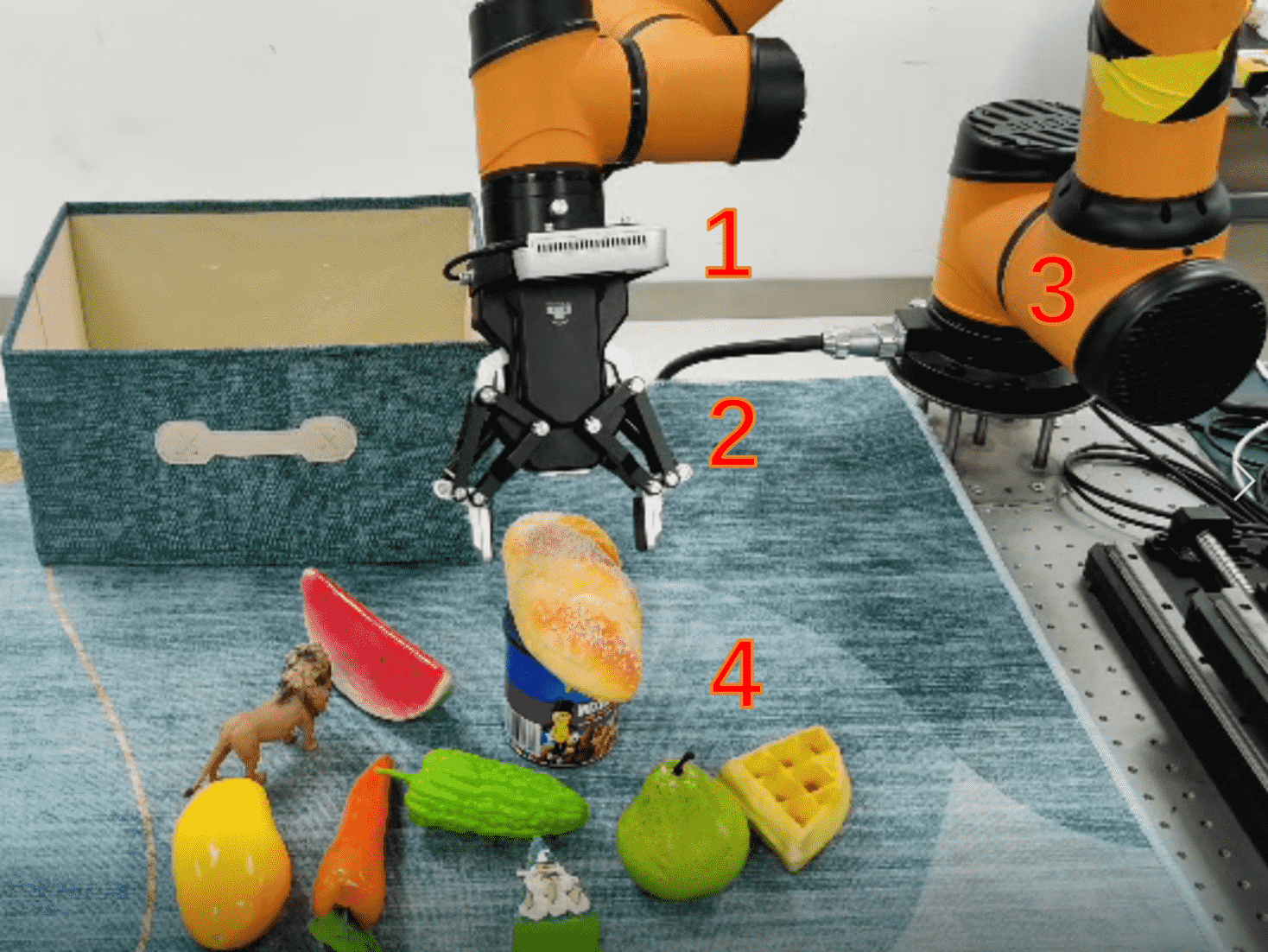
Multi-Source Fusion for Voxel-Based 7-DoF Grasping Pose Estimation (IROS2023)
Check out the video demo here for a detailed look!
Junning Qiu, Fei Wang, Zheng Dang
Addresses quantization loss and boundary information loss in voxel-based 7-DoF grasping via positional encoding, 2D convolution, and a gated fusion mechanism.
🎖 Honors and Awards
- National Scholarship.
- Team Leader of Multiple Award-Winning Projects in National Innovation and Entrepreneurship Competitions.
- Xi’an Jiaotong University Special Scholarship.
📖 Educations
- 2021.09 - 2025.06, Xi’an Jiaotong University.
- 2017.09 - 2021.06, Northwestern Polytechnical University.
PrePrint
What Stops Learning-based 3D Registration from Working in the Real World?
Zheng Dang, Lizhou Wang, Junning Qiu, Minglei Lu, Mathieu Salzmann